雷达波雷达破坏了医疗跟踪点
日期:2025-05-17 10:19 浏览:
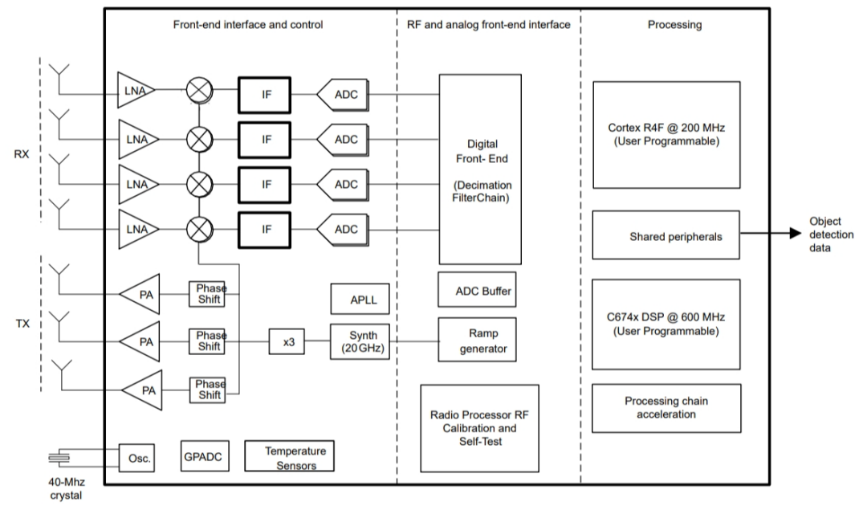
简介:签名的传统基本监控取决于有线接触设备,例如电极贴片,血氧夹等。毫米雷达波传感器使用与发现不相互作用的技术,以实时获得心脏速度和呼吸速度,例如实时的心率和呼吸速度,并穿透了衣服/床以实现准确的监控,并支持许多患者的融合,并且可以在许多患者中进行监控。它的抗干扰能力和隐私保护特性为患者提供了没有健康管理解决方案的自由运动,并促进了在家中智能医疗监测升级。雷达波(mmwave)传感器也可以检测到非常微妙的运动,即使患者的胸部增加。由于胸部运动受呼吸(频率过早)和心率运动(过度统一)的影响,因此胸部运动的精细测量可以实现生命体征的接触测量。对此功能的主要贡献是传感器的能力通过频率调节连续波(FMCW)发现和多输入多输出(MIMO)天线雷达系统的结合,可以检测患者的胸部和速度。传感器还可以看到床上的运动,并为潜在的卧床提供护理人员,并且还可以同时监测许多患者,例如几个成年人。此外,毫米波传感器可以看到一个人的跌倒,并让看护人实时。集成的重要线性FM脉冲坡道线性是确保在FMCW系统中准确和重复大小的参数之一。将整个模拟链纳入整体微波集成电路中,不仅减少了设计和设计之间的差异,而且还有助于改善整体测量,因为可以在衰老和温度的发生率中进行有效的监测和校准。查看Texas Instruments IWR6843的框图,您可以看到TH中唯一的外部元素E发射器接收器部分是标准的40MHz晶体。除此外部40MHz晶体外,IWR6843还提供完整的发射器集成/收件人:坡道生成器。小数的相锁环。 20GHz电压控制的振荡器(VCO)可以与许多前端同步,并在从外部升级(或从外部资源中选择)时,可以使相干采样显着更大的虚拟天线。 IWR6843还包括一个用于发射机和接收器的完整射频链(RF),包括:一个可以编程功率放大器的软件,该软件在根据环境法规和RF修复链接预算时,可以实现多块化的传输功率,以提高灵活性。用于光束控制的动态可编程相变。低噪声放大器使用电动放大器编程时,可以安排链接预算。可以通过发送和接收线性频率调制脉冲来生成具有中间频率(如果)的混合器。如果AMALOG滤波器。模数转换器(ADC)采样频率高达25MHz。图1 IWR6843阻止了图表将完整的RF链集成到MMIC系统上的芯片上,这使得安全性的诊断能力水平。 IWR6843中的完整数字信号链处理可用于:雷达硬件加速器,支持16位范围,多普勒或到达快速傅立叶变换(FFT)以及雷达信号处理中持续的不正确警报率(CFAR)。 600MHz完全编程的数字信号处理器,用于完全可自定义的信号处理。完全可编程的200MHzARM®Cortex®-R4F微控制器用于聚类,监视和应用程序级代码。除了集成模具级别外,IWR6843 IWR6843AOP模型还包括包装中的天线,该天线允许进一步集成并减少印刷电路板(PCB)区域,以在空间或RF信号强迫的应用程序中具有挑战性情况。 FMCWFMCW提供了非常s在测量距离时,IMPLE调制方法可使 - lus较高的高精度。 FMCW还可以平均测量径向尺寸的速度(雷达和目标之间的界线),这可能是高速(例如汽车速度)或低速(例如呼吸时胸部的胸部速度)。监测此类轻度作用通常称为多普勒检测或Microdoppler检测。线性FM脉冲线性FM脉冲描述了FMCW中使用的调制。随着时间的推移,即时频率F(T)随着时间的推移而变化,因此它是FM的线性脉冲。差异 - 发送线性调制脉冲和接收线性调制脉冲之间的频率与飞行时间成正比(达到目标和返回的时间),因此与到达目标的距离成正比。等式1表示广泛的递送bijust:k是按时交付频率的斜率(对于IWR6843,此值可以是任何值的范围。n 0 MHz/µs和250MHz/µs),在振幅(运输功率)下,F0是在线性频率脉冲开始时发送的F0最低频率(57GHz或60GHz。VCO)。公式2表示接收的幅度为:其中,对于δ=(2×d) / v(飞行时间的两倍),d是到目标的距离,V是容器中光的传播速度。混合器乘以发送信号和接收信号之间的频率差(公式3):根据三角函数的基本规则,混合器的输出是两个故障的总和:电影的频率是f_tx和f_rx之间的差异,另一个电影的总和是两个。 IF信号通过允许混合器输出传递到低通滤波器而恢复的信号,其频率是发射器和接收者之间的频率差。公式4表示集成和差异的公式AS:混合器的输出通过低通Filter会产生IF,这是发射器和受体之间频率的差异(因此在飞行时的体积成比例)。方程5是结果信号:ADC是一个信号;请注意,信号频率低于线性频率调制脉冲的频率,因此很容易通过正常的ADC。例如,在IWR6843中,ADC采样的最大采样频率为25MHz。从等式5中,您可以清楚地看到多普勒元素用于测量心率的位置和胸部运动的呼吸速率。当信号仅带有 - 信息(YIF频率为飞行时间)时,FFT和峰值检测时,信号会通过FFT距离,然后执行CFAR算法或阈值算法。图2显示了不同天线之间飞行时间的变化。增加每个接收天线MIMO的图2阶段以图的方式,到达角度来自在每个天线接收处测得的飞行时间。在数学级别上,方程式6将每个天线的方向盘定义为:使用转向矢量将每个靶标的信号与每个天线组合。公式7表示所有天线从每个目标发送的所有信号的总和,其中XI是接收到的信号:方程式8计算的综合电力消耗,如下:传统的波束形成接收(也称为Bartlett束式化方法)是基于狭窄阵列的algorithm方向的较早估计。该算法可以在更大程度上与特定方向相关的光束形式的输出强度,从而表达与方程式9的最大关系AS:计算每个θ的p(a(θ)),公式10近似值r as:其中x是:x是信号矩阵(公式11):从这个公式radar中,radar在三个尺寸中的位置在三个尺寸中启动了renivation的位置。光束控制在您想要看到盖的方向上带有雷达传感器的Turing场景数据通常需要在天线宽度提供的整个视野的每个帧周期中进行扫描。 Athis标题扫描会产生相关和无关的物体的反思,您需要从中捡起并表达特定的东西,或者在这种情况下,可以捡起并表达需要测量重要迹象的患者。确定患者的位置后,可以使用递送光束的形成将光束聚焦,如前所述。如果患者不在视觉轴上,则可以激活梁控制。此功能由6位配置的相位变速杆实现,每个发射器的尺寸为5.625°,提供64个设置以覆盖0°至360°相移。相位变速器位于相应的功率放大器之前,并且已经使用数字到Analog转换器对矢量调制器进行了编程,以在信号启动之前对信号进行相位。图3中包含的PhaseShifter当许多受试者处于雷达传感器的不同方位角时,您可以在框架到框架(通常为100ms至200ms)或更低(使用子帧时)实时编程PhaseShifter。例如,可以根据20°的副帧在-60°至+60°的范围内扫描梁,如图4所示,完整的时间扫描时间小于200ms。如图4所示。它有助于在每个房间的所有方面都可以看到多个在每个主题的迹象,这是每个主题的重要迹象,这些口腔的角度,通过发送-Add的角度,通过发送-Add。图4更改BAWAND子帧20°校准的光束转向角度在电压和温度变化时保持性能,TI MMWAVE雷达设备支持RF初始化阶段(调用RFINIT()应用程序编程界面)和运行时校准时间(在应用程序实施过程中)的校准时间开始。图5显示了校准类型类型的示例,其中可能包括以下类型:模拟PHASE锁定循环校准。合成器VCO。局部振荡分布。 ADC DC偏移电压。如果具有高通和低通截止频率的放大器。峰探测器。发送和接收收益。静止的当前不匹配。发送相位变速器。图5功能线性调制脉冲的定时图,监视和校准6描述了一些RF - 末端积分,以捕获接收端端参数处的运输。结合PA输出和LNA输入的功率检测器,伴随着循环路径,可以监视和付费前部的整个末端。图6一般的诊断操作和对IWR6843毫米波设备的结论的监视,其中包含FMCW雷达要求的高度组合功能,这可能是在前面的全端,具有外部40MHz晶体。这样的产品可以在三个维度上检测微地倍数的细微运动,包括检测人类呼吸和心率。许多TX链与相位变速器的进一步集成提供了光束成型和光束控制的传递,从而使SNR改进到较小的视野,同时保持MIMO以进行3D传感。最后,在整个设备的生命中,跟踪和尚未估算所有模拟成分的整合提供了相同的性能。这种模拟整合水平允许在家中使用重要的标志传感器的多人接触。本文源自Texas Instruments的模拟设计杂志。 《模拟设计杂志》是由德州仪器和专家的工程师仔细编写和编写的,涵盖了从基本知识到高级技术的广泛主题,从数据转换器到传感器应用程序,这些主题为新手和经验丰富的模拟用户提供了实用的信息和解决方案。